3D modeling and reverse engineering
Reverse engineering is the technique for reproducing a product, part or other
physical object as a digital 3D CAD model.
Its principle is based on the acquisition of points’ cloud resulting from the
digitized surface of the part. This points’ cloud is processed through the surface
reconstruction software that is able to construct a polygonal model (used in
machining, simulation and rapid prototyping) and subsequently generate a
NURBS surface.
The reverse engineering is divided into 3 steps :
Phase 1: Acquisition of 3D scan data:
This step consists of acquiring 3D points by digitizing the surfaces
of the part. It generates a points’ cloud. These measures are three-
dimensional (3D) and can be performed on any part.
Different scanning technologies can be used for this step: scanning
with contact (probing) or non-contact scanning (triangulation laser,
optical, photogrammetry, and medical imaging).
Phase 2: Triangulation
A. Processing and alignment of data
- Alignment
- Reduced recovery
- Smoothing
B. Polygon modeling
- Creation of the polygonal mesh
(conversion of the cloud of
points into polygon model)
- Polygon model editing
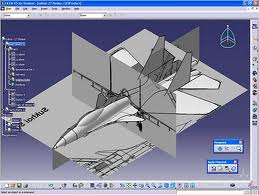
Phase 3: Reverse Engineering
The last step of reverse engineering is to create a network of geometric curves fitting the polygon model. From curves network, surfaces are built.
|
|
Reverse engineering can be used for dimensional control of a molded,
fabricated or machined part in order to properly identify the variations in
the production tool.
The points’ cloud obtained from scanning or STL file can be compared to
the original CAD model to check the dimensional changes of the final part.
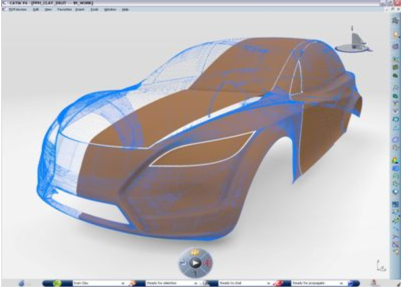
3D scanning
The 3D scanning system is based on the acquisition of three-dimensional points
from surfaces of the digitized part. The points’ cloud is processed through
triangulation and surfaces reconstruction software (Beziers, B-splines, NURBS)..
The quality of a 3D scanning system is characterized by the following
parameters:
La qualité d’un système de numérisation 3D se caractérise par les paramètres suivants:
- Resolution
- Precision
- Repeatability
- Speed of measurement
- Speed of acquisition
- Number of degrees of freedom
- Workload of the sensor